Proceedings
Featured Presentations
How Siemens Energy Enables the Global Energy Transition
What’s New in MATLAB and Simulink R2023a
Dr. Jason Ghidella, MathWorks
Project-Based Learning and Design with Simulation
AI
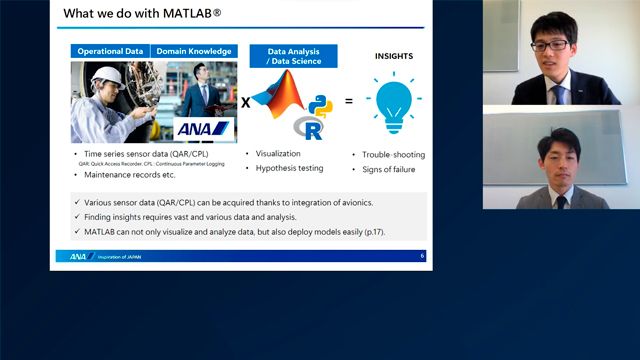
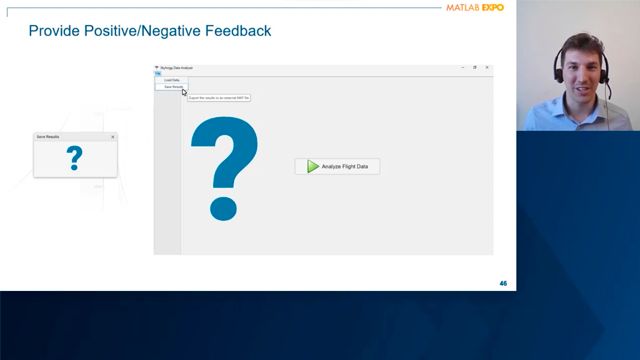
ANA's Predictive Maintenance Challenge: Replace Aircraft Parts Before They Break
Naoya Kaido, All Nippon Airways Co., Ltd.

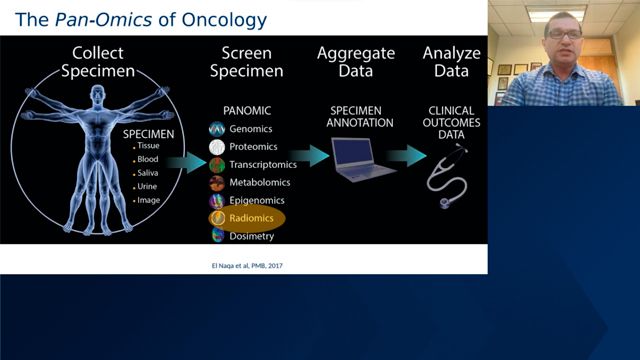
Machine Learning for Cancer Research and Discovery
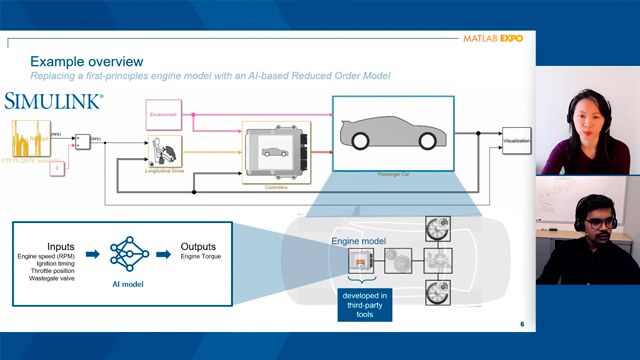
Reduced Order Modeling with AI: Accelerating Simulink Analysis and Design
Terri Xiao, MathWorks
Algorithm Development and Data Analysis
Cell Array, Table, Timetable, Struct, or Dictionary? Choosing a Container Type
David Garrison, MathWorks
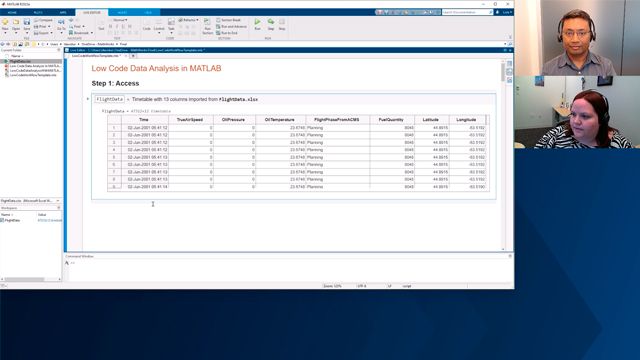
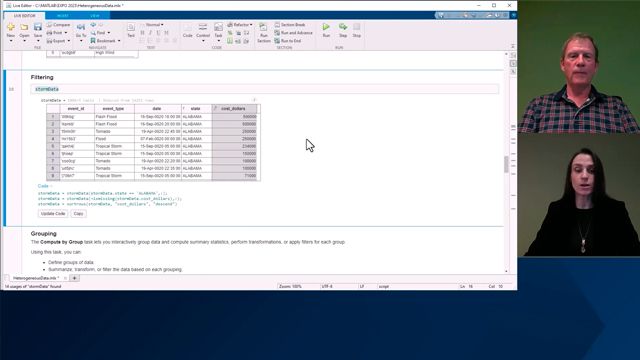
Low Code Data Analysis in MATLAB
Lola Davidson, MathWorks
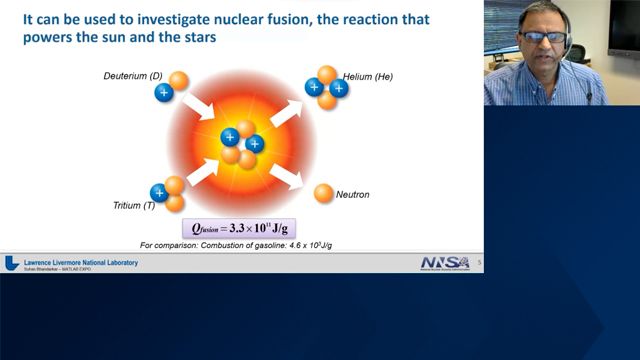
MATLAB for Control of Cryogenic DT Fuel for Nuclear Fusion Ignition Experiments
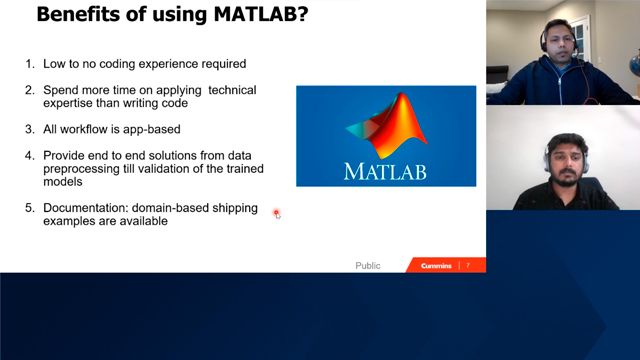
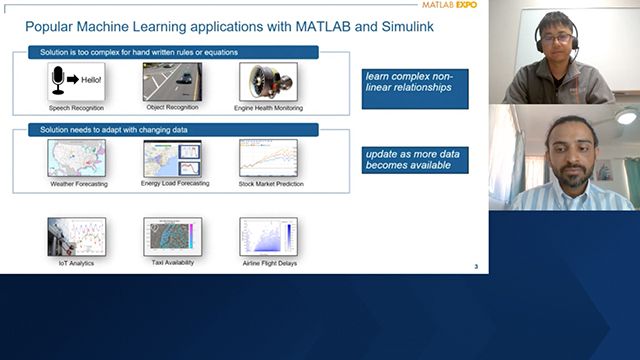
Process of Building AI Models for Predicting Engine Performance and Emissions
Shakti Saurabh, Cummins
Autonomous Systems and Robotics
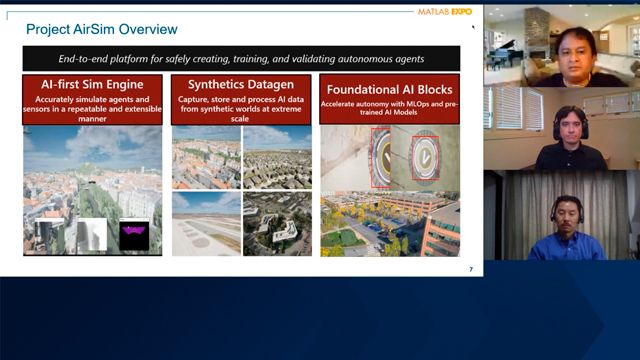
Accelerate Aerial Autonomy with Simulink and Microsoft Project AirSim
Balinder Malhi, Microsoft
Fred Noto, MathWorks
Applying AI to Enable Autonomy in Robotics Using MATLAB
Tohru Kikawada, MathWorks

Bringing the iCub Humanoid Towards Real-World Applications

Cloud, Enterprise, and DevOps
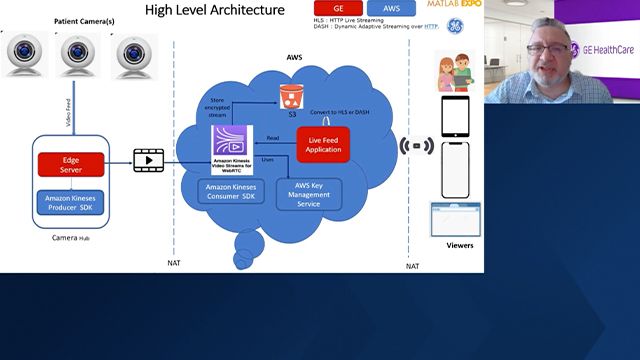
A Cloud-Based MATLAB Visual Inspection System
Arvind Hosagrahara, MathWorks
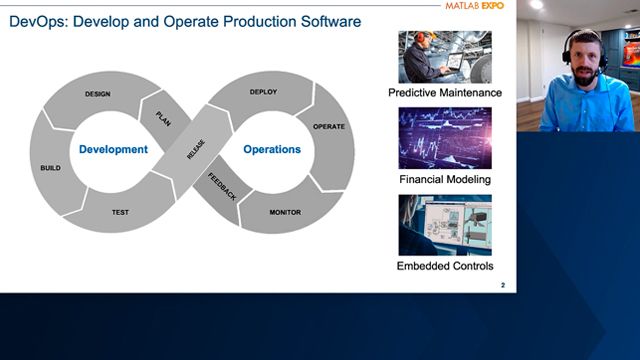
DevOps with MATLAB: A Predictive Maintenance System for Streaming Data
Nicole Bonfatti, MathWorks
Christine Bolliger, MathWorks
Running MATLAB Machine Learning Jobs in Amazon SageMaker
Gandharv Kashinath, MathWorks
Electrification
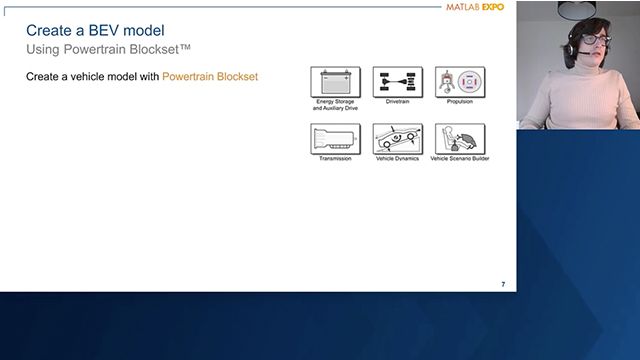
Optimize EV Battery Performance Using Simulation
Dr. Danielle Chu, MathWorks

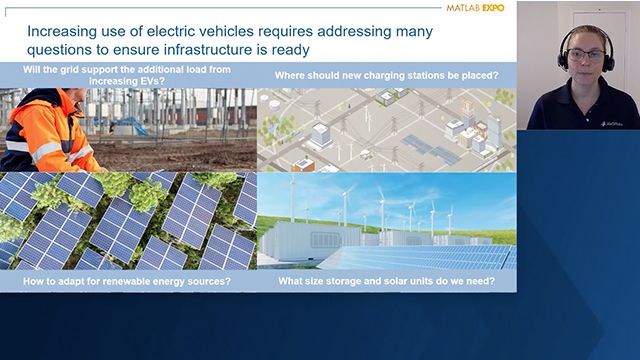
Techno-Economic Analysis of the Impact of EV Charging on the Power Grid
Chris Lee, MathWorks
Ruth-Anne Marchant, MathWorks
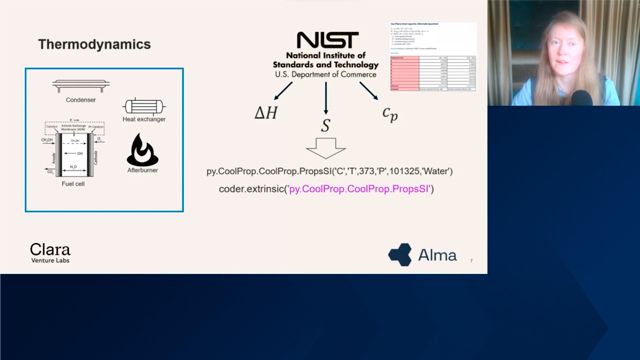
Toward Zero-Emission Shipping with Fuel Cells and Model-Based Design
Inclusive Innovation: Technology by and for All

APAC EMEA Inclusive Innovation: Technology by and for All
Daniela Dobreva-Nielsen, AZO Anwendungszentrum GmbH Oberpfaffenhofen
Mohan Sundaram, ARTILAB Foundation
Eva Pelster, Moderator, MathWorks
AMER Inclusive Innovation: Technology by and for All
Milka Santana, Perfecto Labs
Armani Hrobowski, Argonne National Laboratory
Ji Yang Luo, Moderator, MathWorks
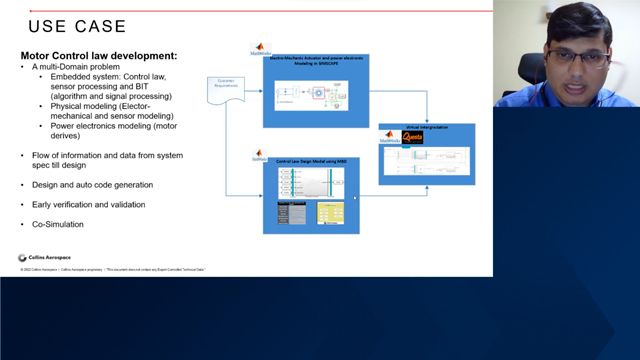
Modeling, Simulation, and Implementation
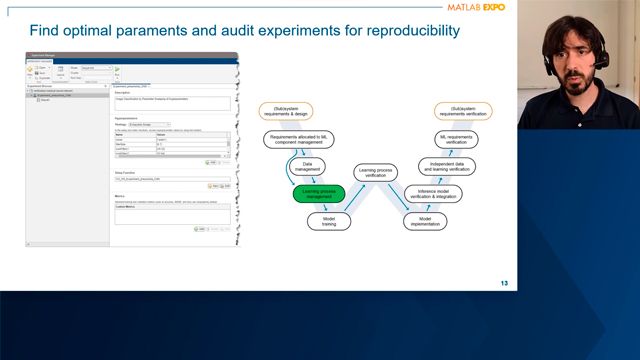
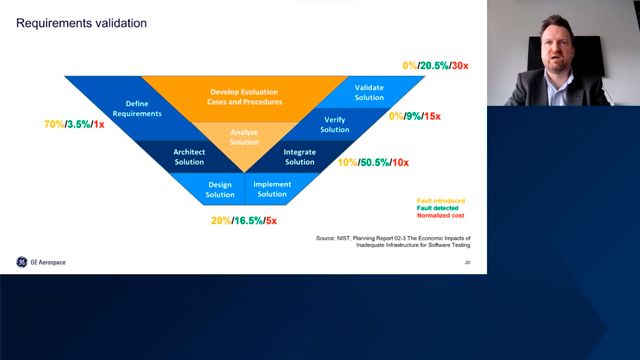
Formalizing Requirements and Generating Requirements-Based Test Cases
Dallas Perkins, MathWorks
Yann Debray, MathWorks
Plenary
How Siemens Energy Enables the Global Energy Transition
What’s New in MATLAB and Simulink R2023a
Dr. Jason Ghidella, MathWorks
Project-Based Learning and Design with Simulation
Preparing Future Engineers and Scientists
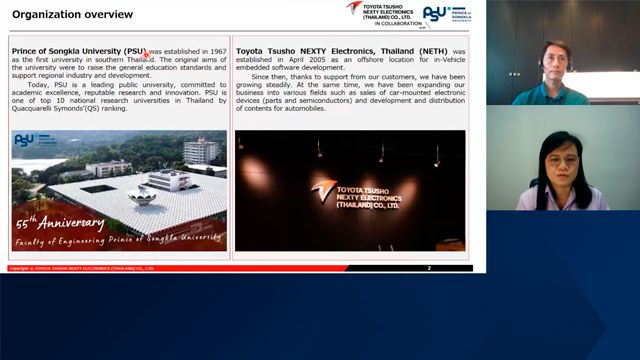
NETH and University Collaboration for Talent Workforce Development
Nattha Jindapetch, Prince of Songkla University (PSU)

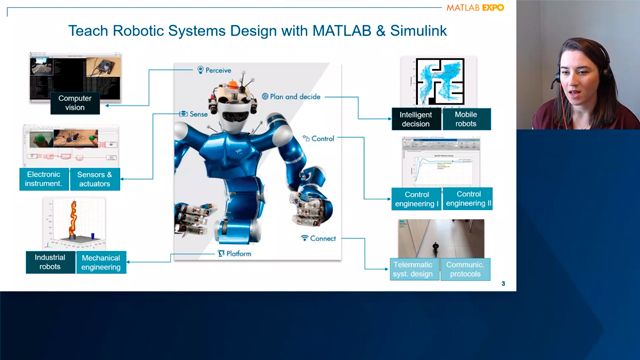
Teaching Robotics and Controls Made Easier
Melda Ulusoy, MathWorks
Wireless Connectivity and Radar
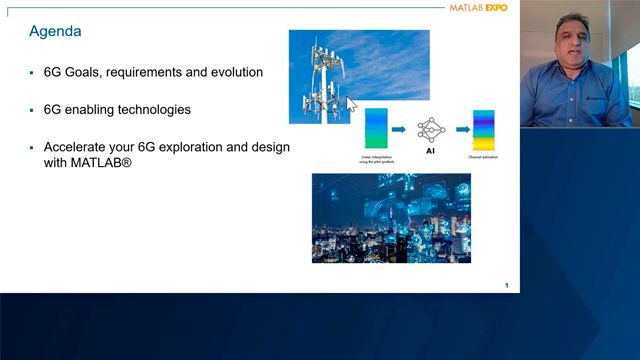
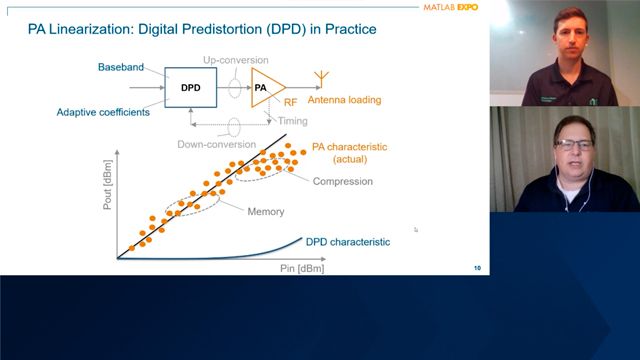
6G Wireless Technology: Accelerate Your R&D with MATLAB
Dr. Houman Zarrinkoub, MathWorks
Transforming Wireless System Design with MATLAB and NI
Jeremy Twaits, NI