Proceedings
Featured Presentations

Keynote Presentations

What's New in MATLAB and Simulink
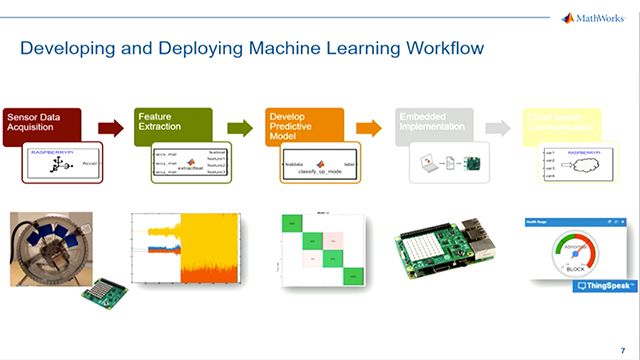
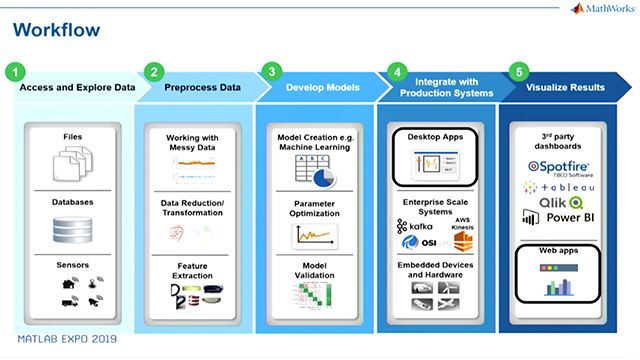
Data Science and Predictive Analytics

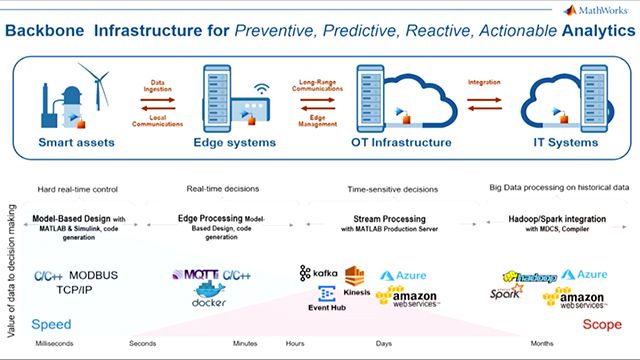
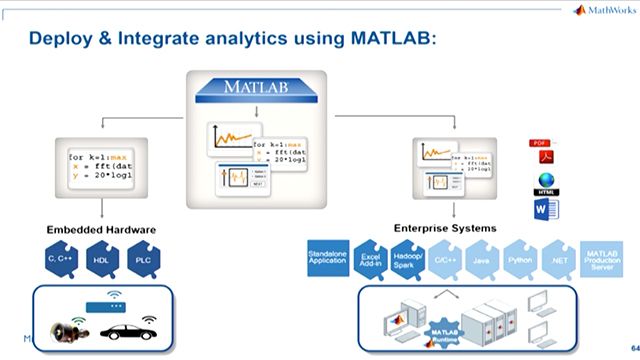
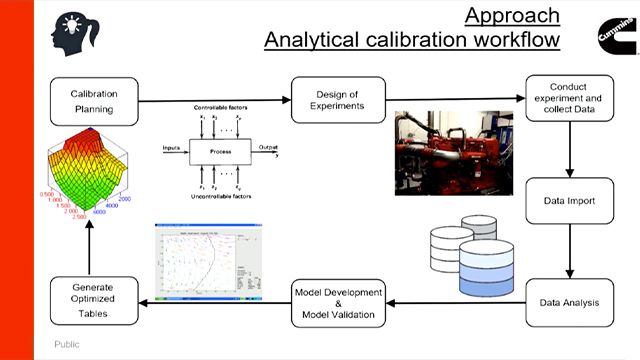
Industrial IoT and Digital Twins
Jannat Manchanda, Mahindra & Mahindra Ltd
Saifee Aliakbar, Mahindra & Mahindra Ltd
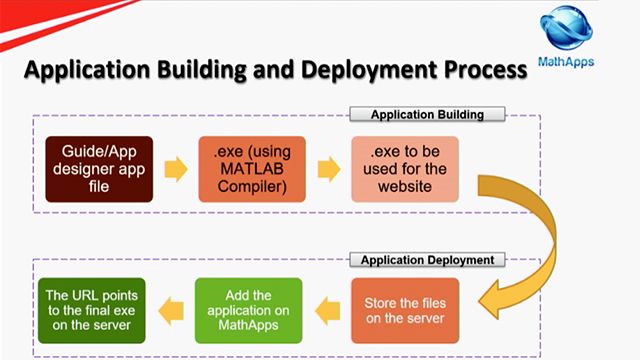
Building and Sharing Desktop and Web Apps
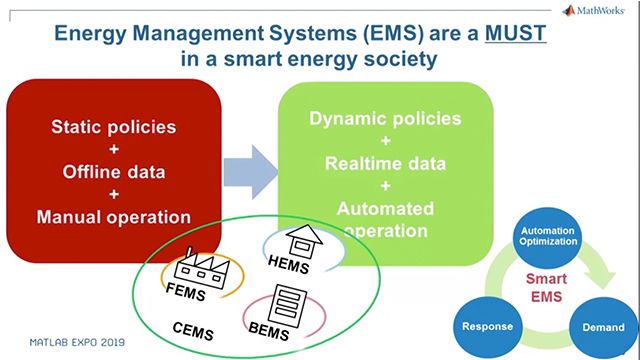
Optimization in Energy Management Systems
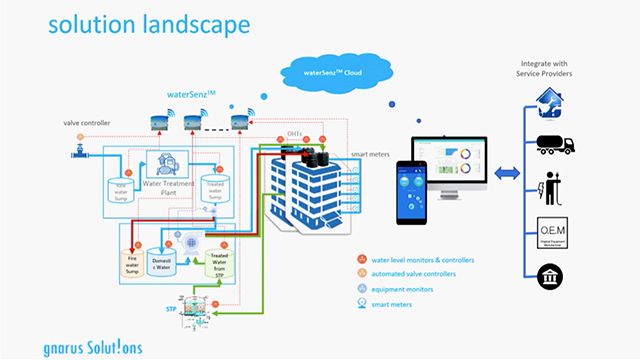
waterSenz: A Digital Water Management System
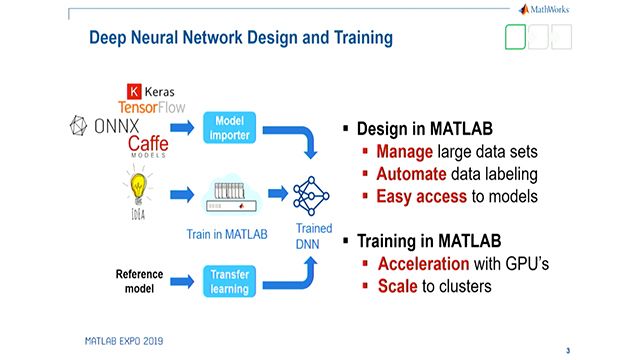
Deep Learning and Autonomous Systems
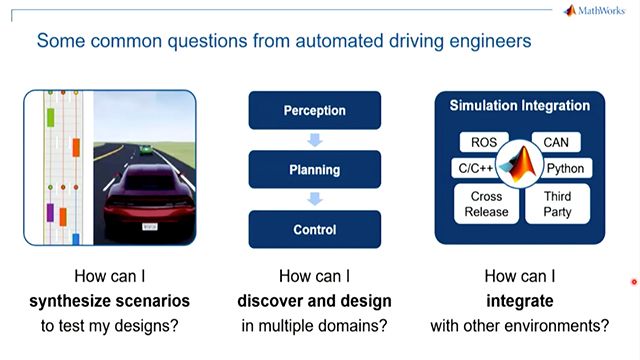
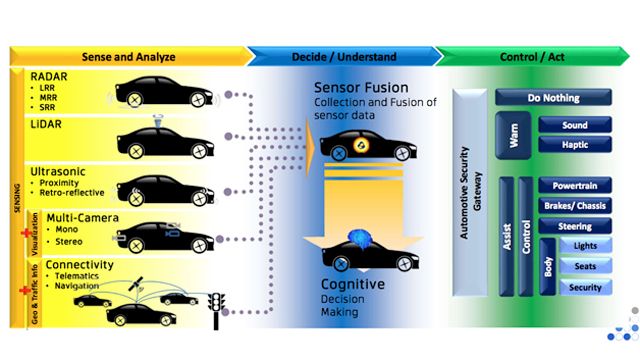
Automated Driving System Design and Simulation
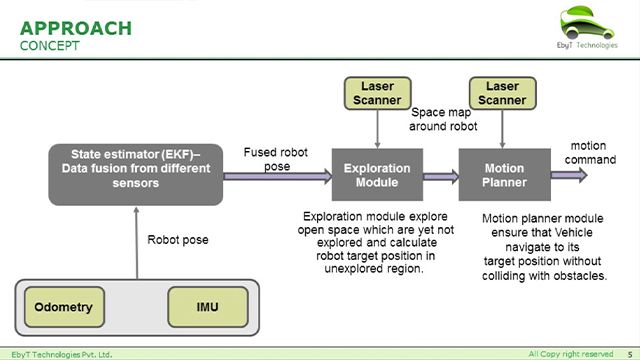
LiDAR-Based Exploration of Unknown Indoor Space by a Robotic System
Lidar Processing for Automated Driving



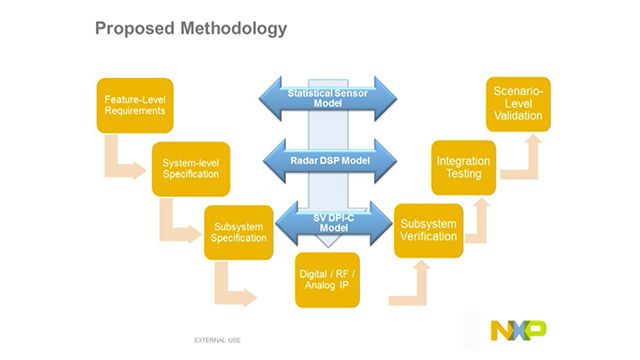
Shift-Left Verification of Automotive Radar
Kaushik Vasanth, NXP India Pvt. Ltd.
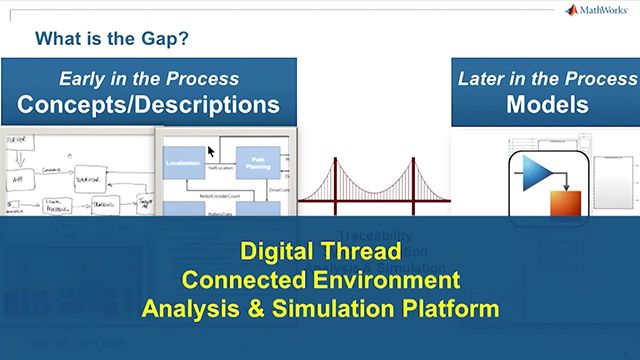
Systems Modeling, Implementation, and Verification
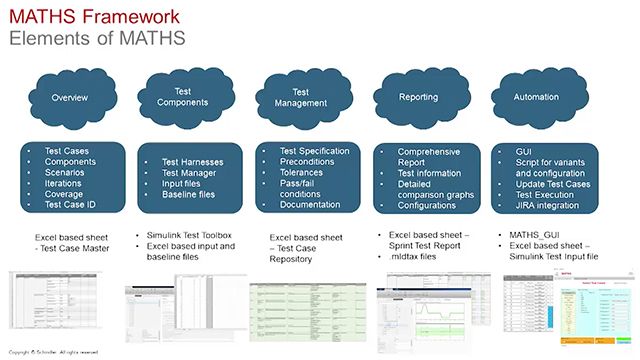
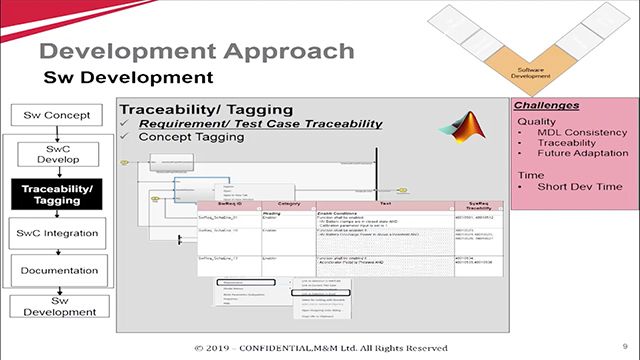
Automated Physical Model Verification Framework Using Simulink Test
Suchay Sawardekar, Schindler

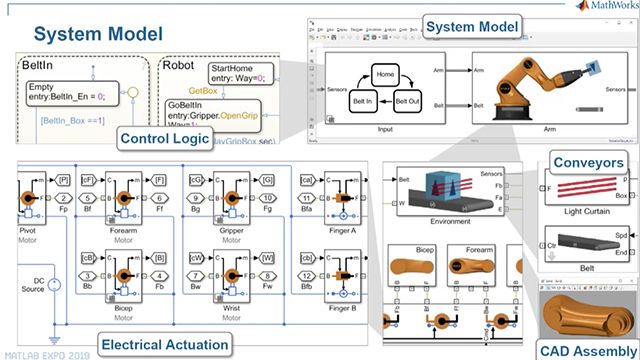
Optimizing Robotic Systems with Simscape
Control Software Development and Testing Using MATLAB
Nabal Pandey, Mahindra & Mahindra Limited

Home Appliances Controls Development Using Model-Based Design
Pranoti Joshi, Whirlpool of India Ltd
Signal Processing Systems: From Design to Implementation
Design Analysis and Verification of 5G NR Waveforms Using MATLAB
Dr. Sreenath Ramanath, Lekha Wireless
Vishal Kumar Patil, Lekha Wireless
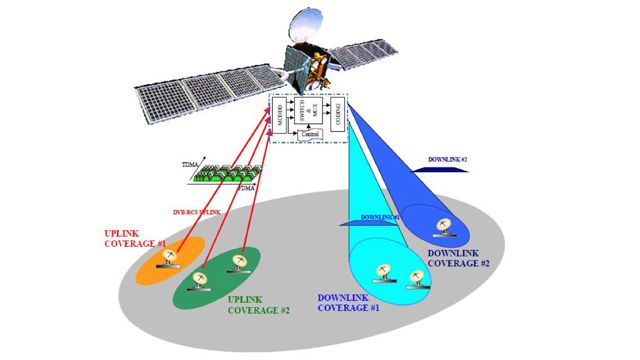
Design and Verification of DVB–RCS to DVB S2 On-Board Processing Payload Using MATLAB and Simulink
Dr. Deepak Mishra, Space Applications Centre (SAC), ISRO


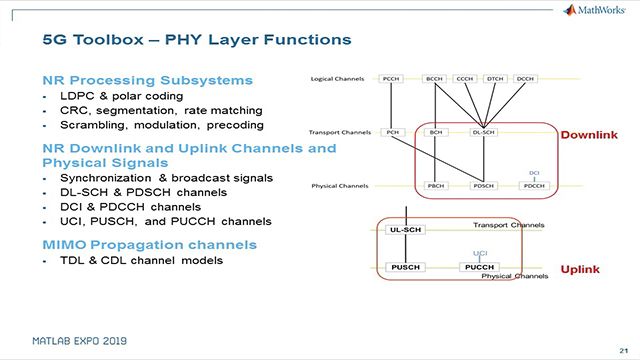
5G NR PHY Algorithm Design and Implementation in MATLAB
Sagar Shriram Salwe, Sooktha Consulting Private Limited
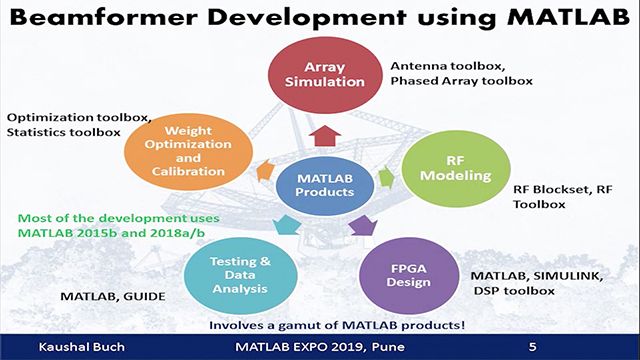
Antenna Array Simulation and Beamforming for the Expanded GMRT
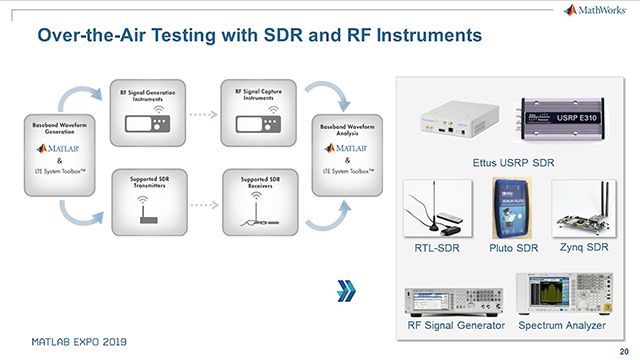
SDR-Based Communications System Design for HSP Applications
Bibin Varghese, VSSC ISRO
Master Classes
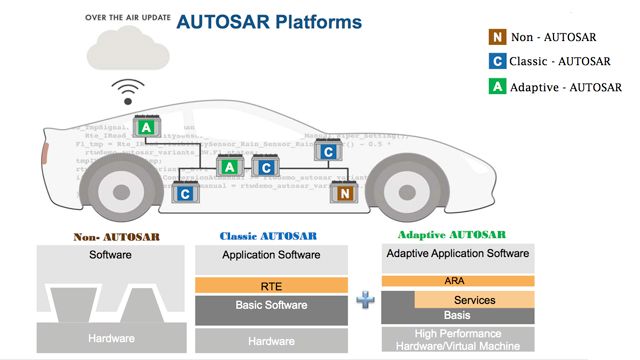
Comprehensive Workflow for AUTOSAR Classic and Adaptive Using Model-Based Design
Durvesh Kulkarni, MathWorks
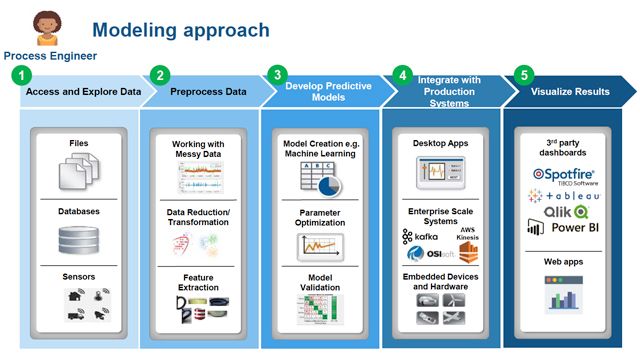
Deploying AI for Near Real-Time Manufacturing Decisions
Pallavi Kar, MathWorks
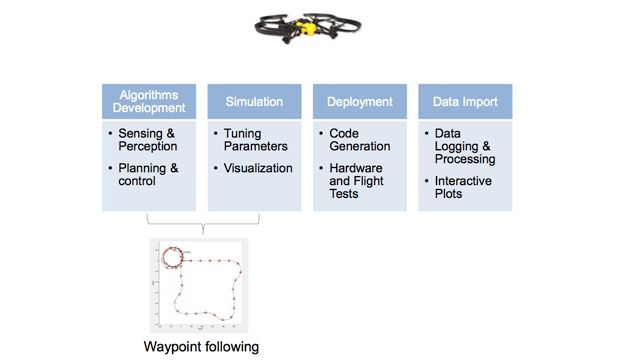
Model-Based Design for Autonomous Aerial Systems
Naga Chakrapani Pemmaraju, MathWorks
Customer Poster Presentations
Abishek Dilipkumar and Rohini Ravichandran, BlueBinaries Engineering and Solutions Pvt. Ltd.

Effective Classroom Teaching of Model Predictive Control Using MATLAB as Academic Coursework
Saket Adhau and Sayli Patil, COEP
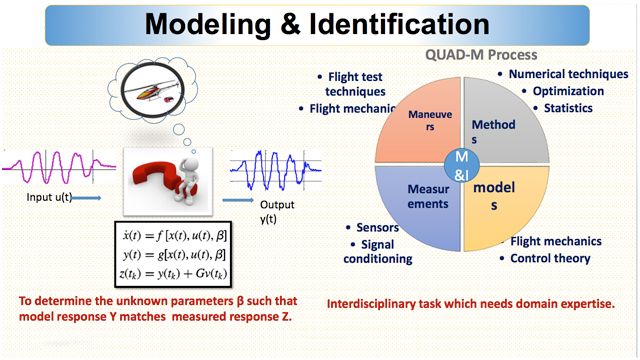
Modeling and Identification of a Rotary Wing Unmanned Aerial Vehicle
Khadeeja Nusrath TK and Yoganathan P, CSIR-NAL
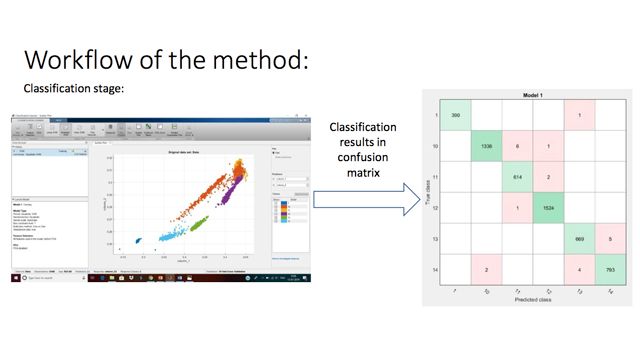
Automated Hyperspectral Image Classification Using Spatial-Spectral Features
Shivani Dhok, Indian Institute of Information Technology
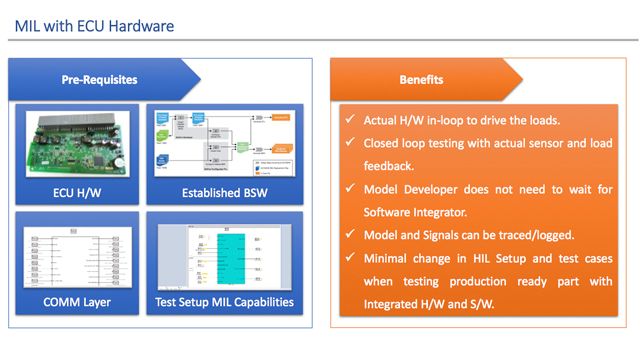
MIL in Test-Driven Development for Achieving Agile ECU Development
Nukul Sehgal, Interface Microsystems
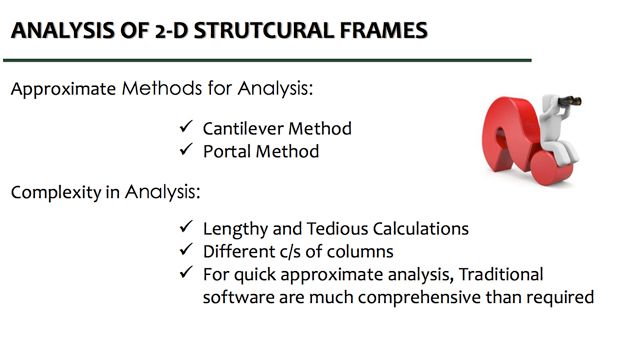
Analysis of a 2D Structural Frame Using Approximate Methods
Dharmil Baldev, Maharshi Joshi, and Subhrajyoti Mandal, International Institute of Information and Technology
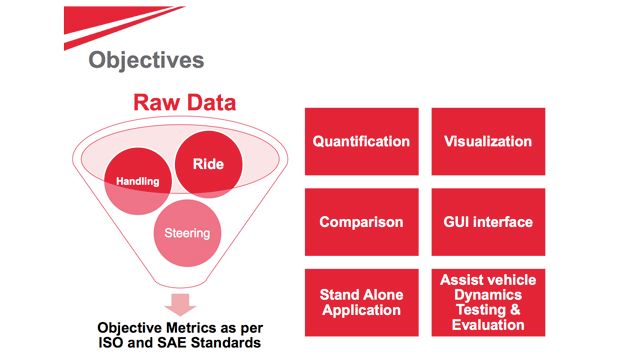
mRIHAST: A Performance Evaluation Tool for Ride, Handling, and Steering
Shubham Kedia and Divyanshu Joshi, Mahindra and Mahindra Ltd.
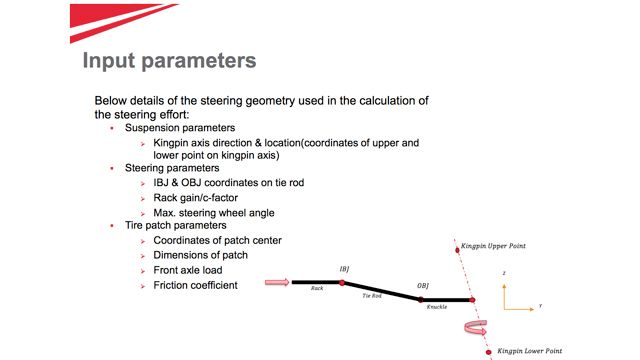
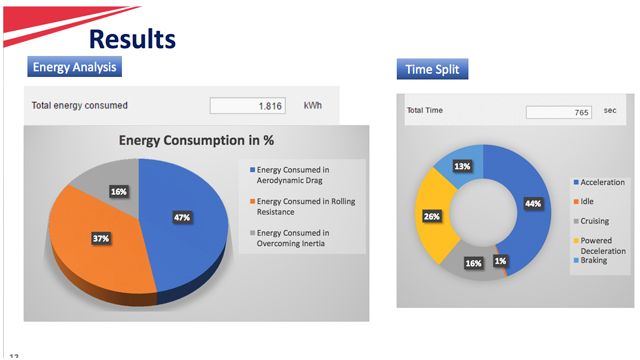
Estimation of Steering Effort in Parking Conditions Using a MATLAB Based Application
Saifee Aliakbar, Mahindra and Mahindra Ltd.
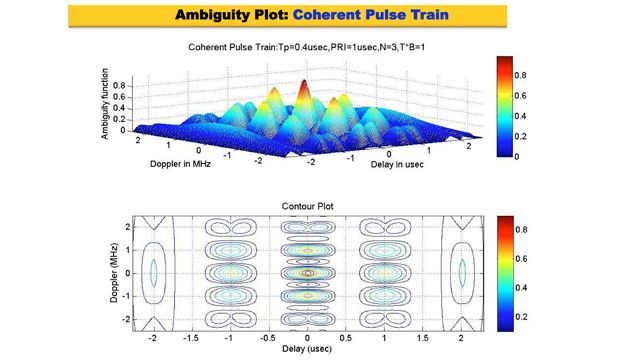
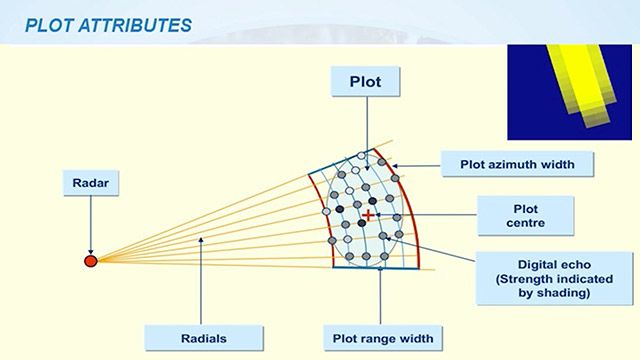
Waveform Modeling and Option Analysis for Radar Systems Using MATLAB
Nilang Trivedi, MMWS & HAPSD, DRSS
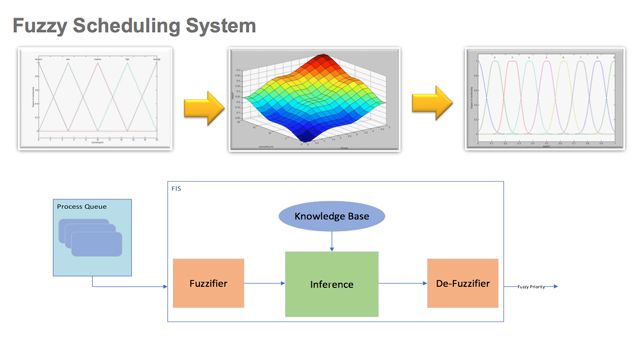
MATLAB and Simulink Modeling of a Fuzzy Scheduling Algorithm for an Operating System
Vardhana M, NXP India Pvt. Ltd.
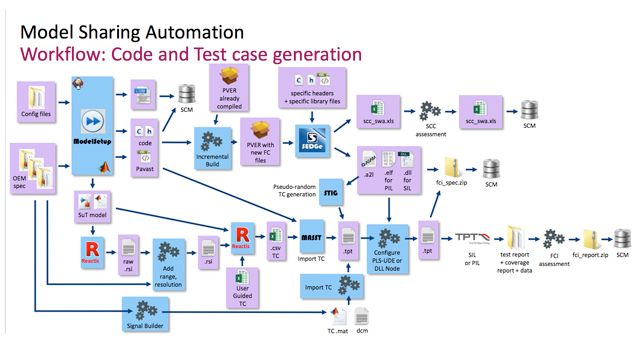
Automation of Back-to-Back Validation Using MATLAB and Simulink
Muhammed Farook Sadarudeen P K, Robert Bosch Engineering and Business Solution Limited Private Limited
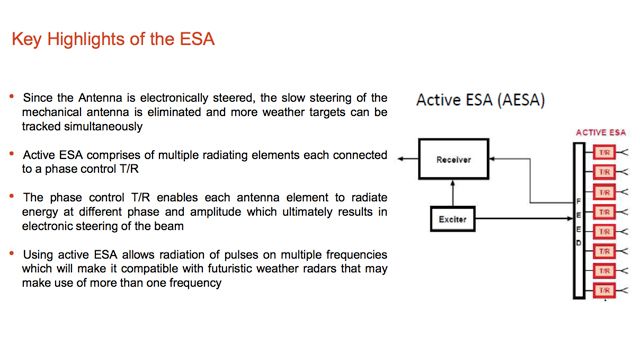
Electronically Scanned Array Antenna for an Onboard Weather Radar
Deepak Rajagopal and Sathiyaseelan Tulasidasan, Rockwell Collins
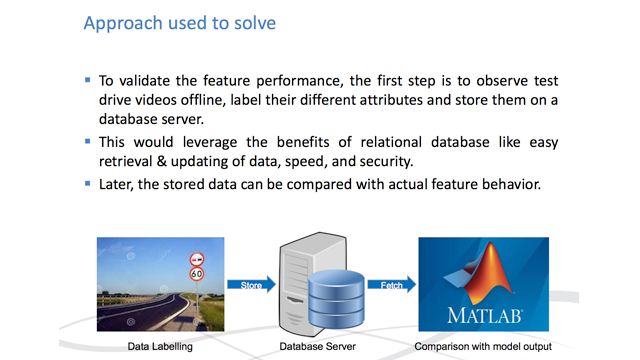
Offline Vehicle Drive Data Labelling and Searching Using Database Toolbox
Radhika Lakhkar and Pranav Mutha, Tata Consultancy Services Pvt. Ltd.