講演資料
特別講演のプレゼンテーション


9月28日:機械学習とディープラーニング
9月29日:機械学習とディープラーニング, ロボティクスと自律システム

人協働多軸ロボットのハンド技術開発における仮想開発環境の活用
山岸 友樹, 京セラ株式会社
久保 大輔, 国立研究開発法人 宇宙航空研究開発機構
9月30日:自動運転, パワートレイン開発, ロボティクスと自律システム


ガスタービンエンジン制御用のマルチコアマイコン向けコード生成


松永 高志, 日本車輌製造株式会社
自律移動システムのためのセンサーフュージョンとナビゲーション
10月1日:パワーエレクトロニクス

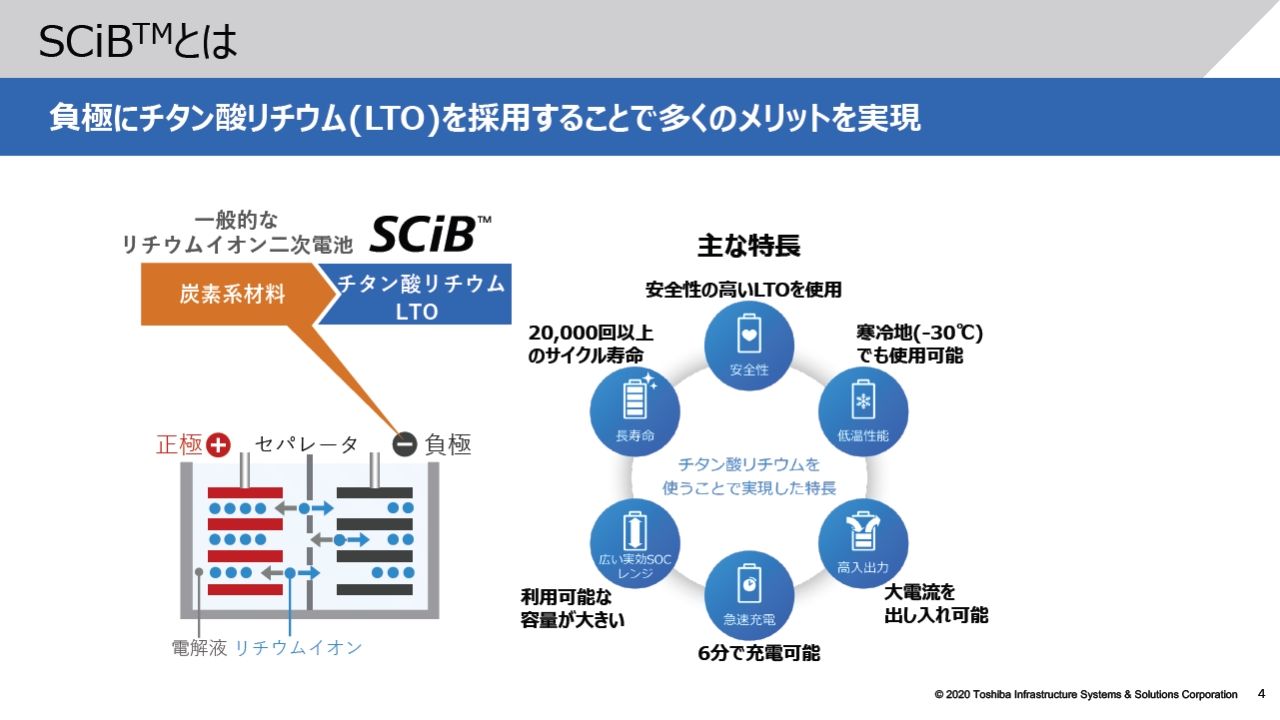
近藤 敦美, 東芝インフラシステムズ株式会社
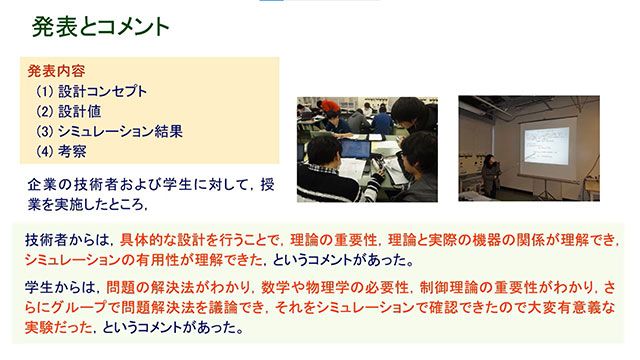
これからのモータ制御システム構築 ~ 産学連携の開発事例 ~
10月2日:医療・産業機器のモデルベースデザイン、AI/IoT
Lumada-MATLAB連携によるIoTソリューション構築

佐藤 朋也, オリンパス株式会社
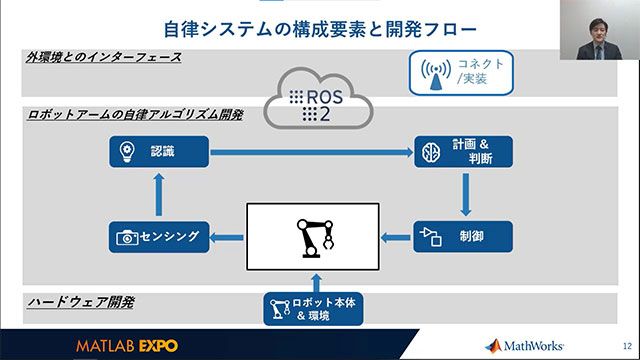
最新のモデルベース技術で実現するロボットアームの開発と自律化
ポスター発表
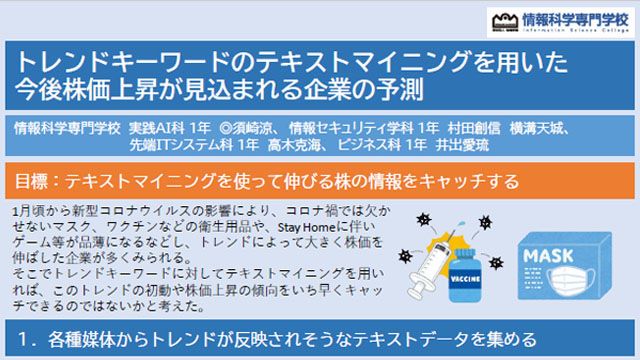
トレンドキーワードのテキストマイニングを用いた今後株価上昇が見込まれる 企業の予測
須崎 涼、村田 創信、横溝 天城、高木 克海、井出 愛琉, 学校法人 岩崎学園 情報科学専門学校
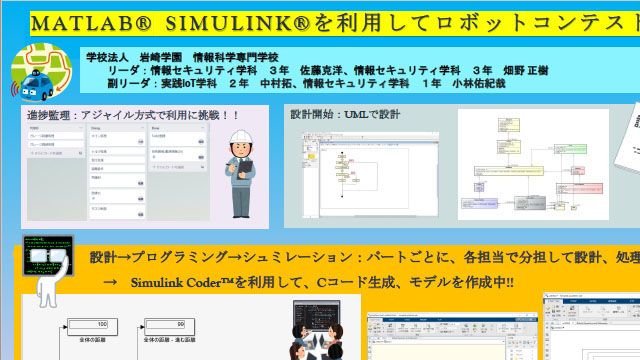
MATLAB® Simulink® を利用してロボットコンテストに挑戦中
佐藤 克洋、畑野 正樹、中村 拓、福島 正太郎、小林佑紀哉, 学校法人 岩崎学園 情報科学専門学校
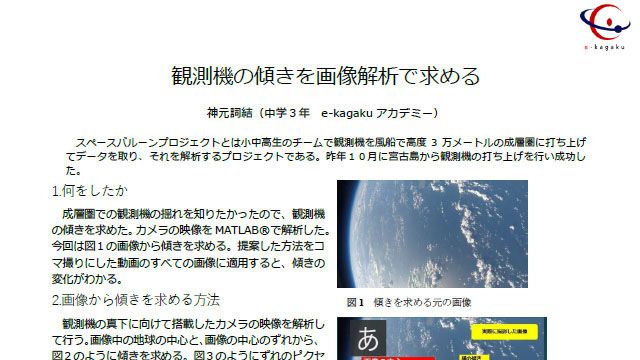
神元 詞結, e-kagaku アカデミー
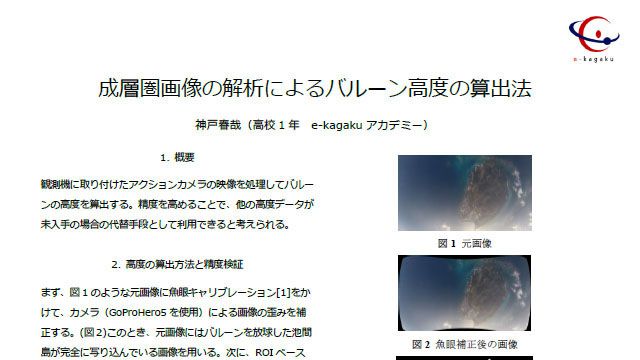
神戸 春哉, e-kagaku アカデミー
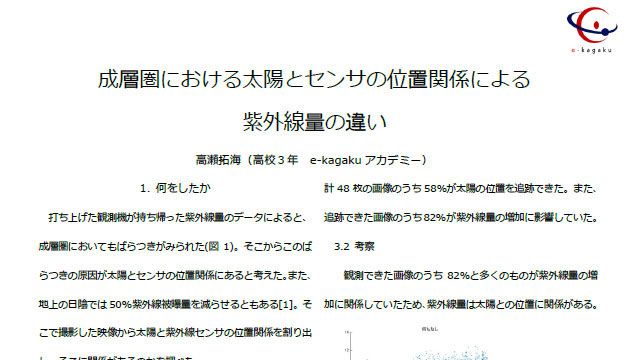
高瀬 拓海, e-kagaku アカデミー
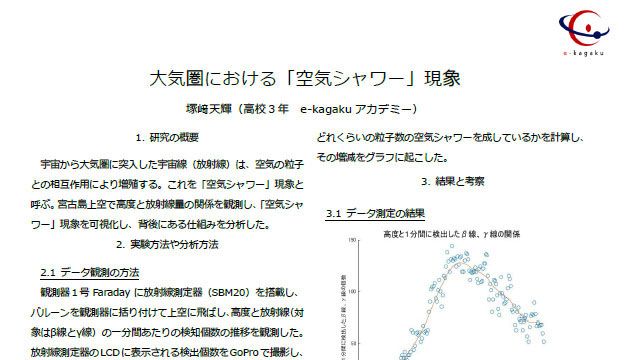
塚﨑 天輝, e-kagaku アカデミー
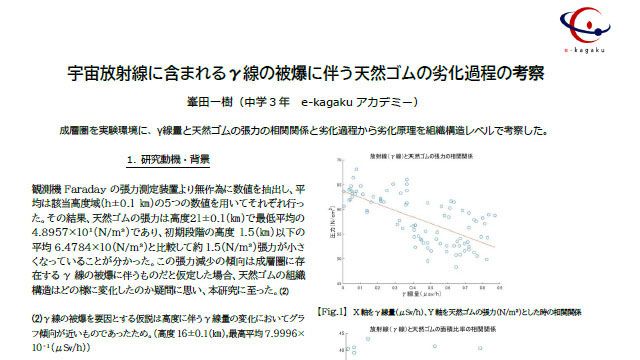
宇宙放射線に含まれるγ線の被爆に伴う天然ゴムの劣化過程の考察
峯田 一樹, e-kagaku アカデミー
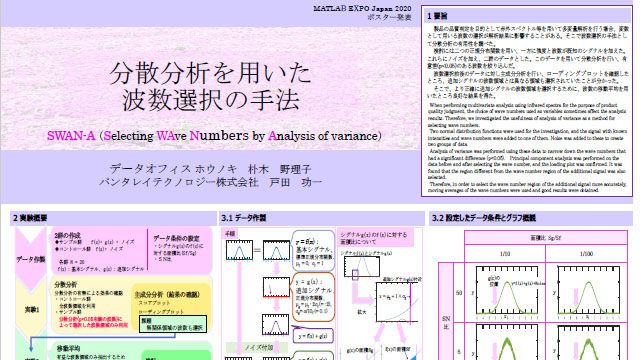
朴木 野理子, データオフィス ホウノキ

岩切 萌, 東北大学大学院
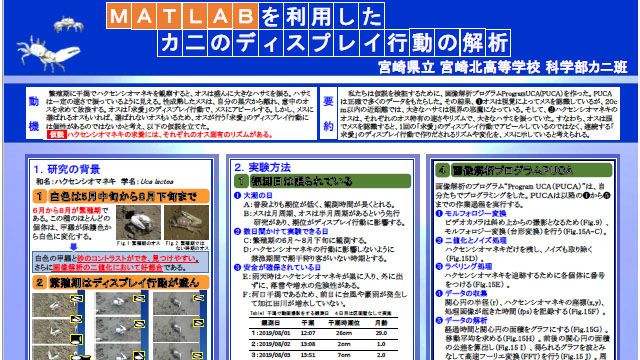
科学部カニ班, 宮崎県立宮崎北高等学校
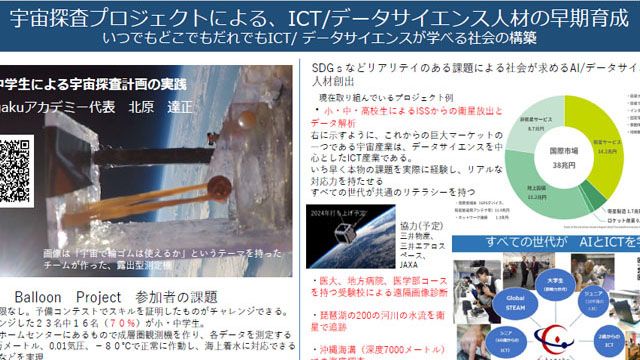
宇宙探査プロジェクトによる、ICT/データサイエンス人材の早期育成
北原 達正, e-kagaku アカデミー