
코딩 초기부터 통합 과정까지 Polyspace를 활용하는 방안
C/C++ 코드에 잠재된 결함들을 코딩하며 바로 확인할 수 있는 Polyspace as You Code 기능부터 코드 커밋 이후 정적 분석 작업 자동화 및 동료 검토 과정에 대해 설명합니다.
MATLAB을 이용한 로봇 매니퓰레이터의 Pick-And-Place 데모
연구용으로 많이 사용되는 KINOVA Robot을 제공되는 API를 이용해 MATLAB/Simulink에 직접 연결하여 로봇에 장착된 RGB-D 카메라 입력에서 전방의 물체를 인식 분류하는 딥러닝 검출기를 설계 및 구현하는 방법, 분류된 물체를 원하는 위치로 옮기기 위해 inverse kinematic나 RRT* 기반의 경로 생성 알고리즘을 이용하는 방법들을 Simulink로 구현하는 방법을 보여드립니다.

완전한 Requirements 작성 및 모델과 일관성 검증
Requirements Table로 작성된 Requirements는 명확하며 Simulation이 가능하고 일관적이며 완전합니다. Cooling System의 MBSE Demo를 통해서 Requirements Table로 Requirements를 작성하고 일관성과 완전함을 확인한 후 Formal Verification을 통하여 모델과 Requirements가 동일함을 보이는 과정을 설명합니다.
가상 주행 시험을 위한 RoadRunner Scenario & CARLA Co-Simulation
RoadRunner Scanario를 이용해 테스트 케이스를 작성하고, CARLA와 연동하여 자율주행 차량 해석에 관한 과정을 설명합니다.
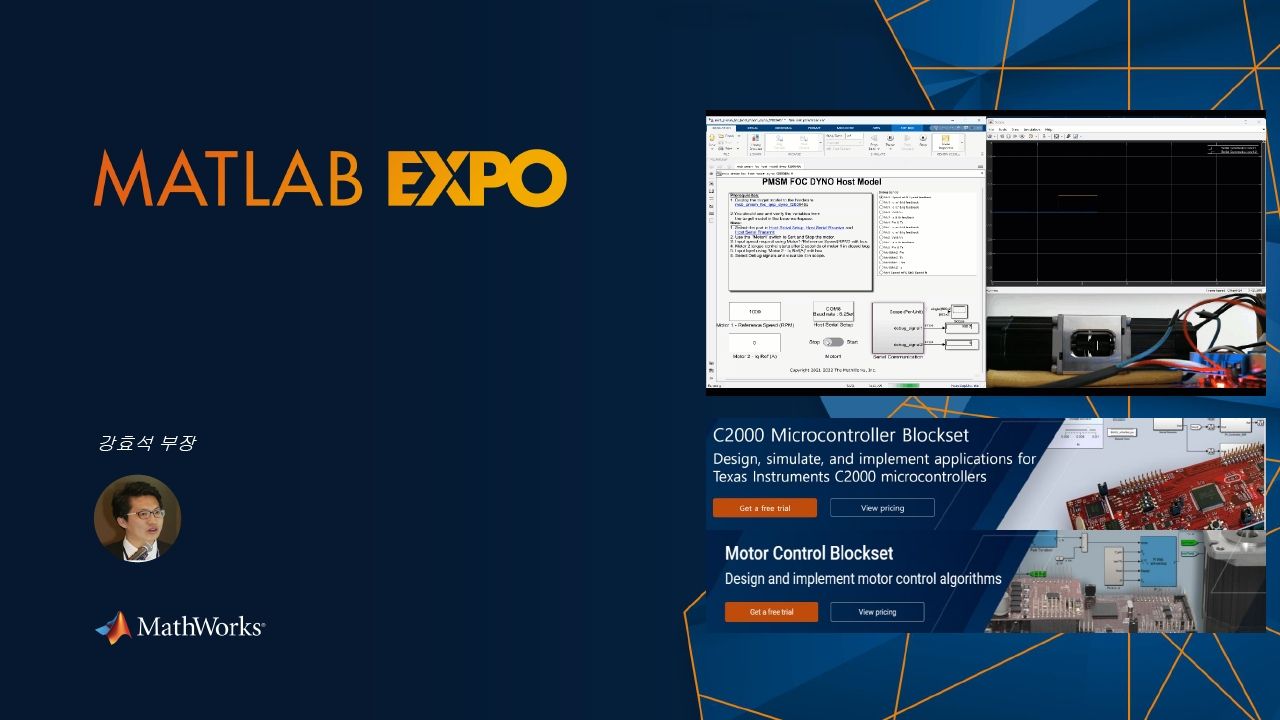
C2000 Microcontroller Blockset(신규 제품)을 이용한 PMSM의 듀얼모터 제어
23a에 새롭게 출시된 C2000 Microcontroller Blockset을 이용한 모터 제어에 대한 데모입니다. FOC(Field-Oriented Control)를 사용하여 dyno 설정에 연결된 2개의 3상 영구 자석 동기식 모터(PMSM)를 제어합니다.

데이터 습득, AI 모델 구현 및 학습, 그리고 Cloud 배포까지 MATLAB과 Python을 융합하여 진행하는 데모입니다. AI 모델의 제품화에 있어 MATLAB에서 제공하는 Workflow에 TensorFlow, PyTorch 등 오픈소스 AI 모델을 운영하는 방법, Python 환경에 코드를 배포하는 방법 등을 시연합니다.

점진적 머신러닝 접근방법을 이용한 신호 무결성 시뮬레이션
많은 시간과 노력이 요구되는 신호 무결성 시뮬레이션 워크플로우에 점진적 머신러닝 방법을 도입함으로써 학습된 AI 모델을 기반으로 시뮬레이션을 자동화 하는 방법을 소개합니다.
Satellite Communications Toolbox를 이용한 위성 시나리오 시뮬레이션
Satellite Communications Toolbox는 위성 통신 시스템 및 링크를 설계, 시뮬레이션 및 검증하기 위한 표준 기반 도구를 제공합니다. 위성 시나리오를 정의하고 위성, 지상국, 다른 항공기와 다른 위성 간의 가시성 액세스 분석 및 통신 링크 분석하는 방법을 소개합니다.

인공지능 모델을 Edge Device 배포하기 위해서는 메모리 그리고 처리 속도의 관점에서 모델 경량화가 요구될 수 있습니다. MATLAB 환경에서 Pruning, Quantization 등의 모델 경량화 기법을 소개합니다.

MATLAB과 AGX Jetson Orin을 이용한 Edge AI 솔루션 데모
Edge GPU 디바이스를 활용하기 위해서는 cuda 프로그래밍을 하거나 자동 cuda 코드의 생성 및 Model Compression이 필요합니다. Deep Learning Toolbox와 GPU Coder를 기반으로 AI 모델을 Edge Device로 배포하는 방법을 소개합니다.